
Xiao Liu
College of Information and Computer Sciences, University of Massachusetts Amherst • +1-4132753041 • xiaoliu1990@cs.umass.edu
I am a first-year PhD student in College of Information and Computer Sciences at the University of Massachusetts Amherst, advised by Professor. Hui Guan, My research interests are Computer Vision ,Machine Learning and Graph Neural Networks.
Education
Tongji University
M.Sc. in Software Engineering • 2015 — 2018
- Overall GPA: 4.36/5.0 • Average Score: 87.5/100
- TOEFL: 96
- Related Courses: Advanced Topics in Image Processing, Machine Learning: Theories and Applications, Pattern Recognition, Software Modeling and Analysis, Distributed Computing, State-of-the-art Software, etc.
Tongji University
B.Ec. in International Trade • 2009 — 2013
- Overall GPA: 3.62/5.0 • Average Score: 81.2/100
Publications
Xiao Liu, Lin Zhang, Ying Shen, Xuan Shao, and Tianjun Zhang, A method of adjusting the brightness and color consistency of the surround-view system for vehicles (Patent), announced by The Patent Office of the People's Republic of China, 2019
Lin Zhang, Lijun Zhang, Xiao Liu, and Ying Shen, No reference quality assessment algorithm for image exposure based on neural network (Patent), announced by The Patent Office of the People's Republic of China, 2018
Lin Zhang, Linshen Li, Xiyuan Li, Xiao Liu, Ying Shen, Yanling Xu, Parking lot detection method (Patent), announced by The Patent Office of the People's Republic of China, 2018
Bin Wu, Liechuan Ou, and Xiao Liu, Dish detection method (Patent), announced by The Patent Office of the People's Republic of China, 2017
Bin Wu, Liechuan Ou, and Xiao Liu, Dish identification method (Patent), announced by The Patent Office of the People's Republic of China, 2017
Research Experience
Environment Perception for Unmanned Vehicle
Directed by Prof. Lin Zhang • May, 2018 — Prensent
- Researched on system construction and algorithm design in environment perception for unmanned vehicle, including hardware building, parameter calibration, SLAM, object detection and tracking.
- Developed a fast and accurate intrinsic and extrinsic calibration method with Bundle Adjustment for multiple fisheye cameras in Advanced Driver Assistance Systems (ADAS).
- Proposed an online compensation method for bird-view image registration to minimize photometric error of four bird-view images overlap. (On-going)
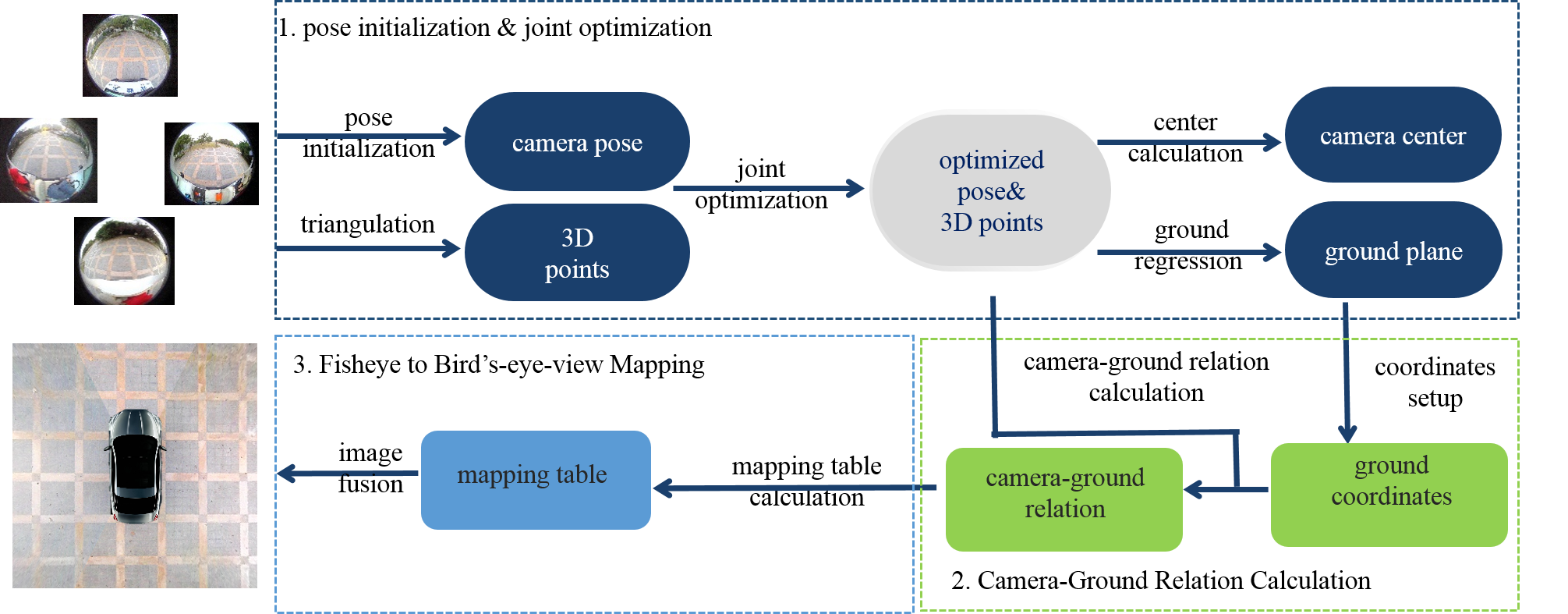
Flow chart of surround-view stitching. The surround view system is consisted of four fisheye cameras. The algorithm will firstly optimize the camera poses with Bundle Adjustment according to the loop closure constraint of the cameras, then automatically set up ground coordinate system. After that, the mapping table will be generated for final surround-view image stitching based on camera-ground relationship.
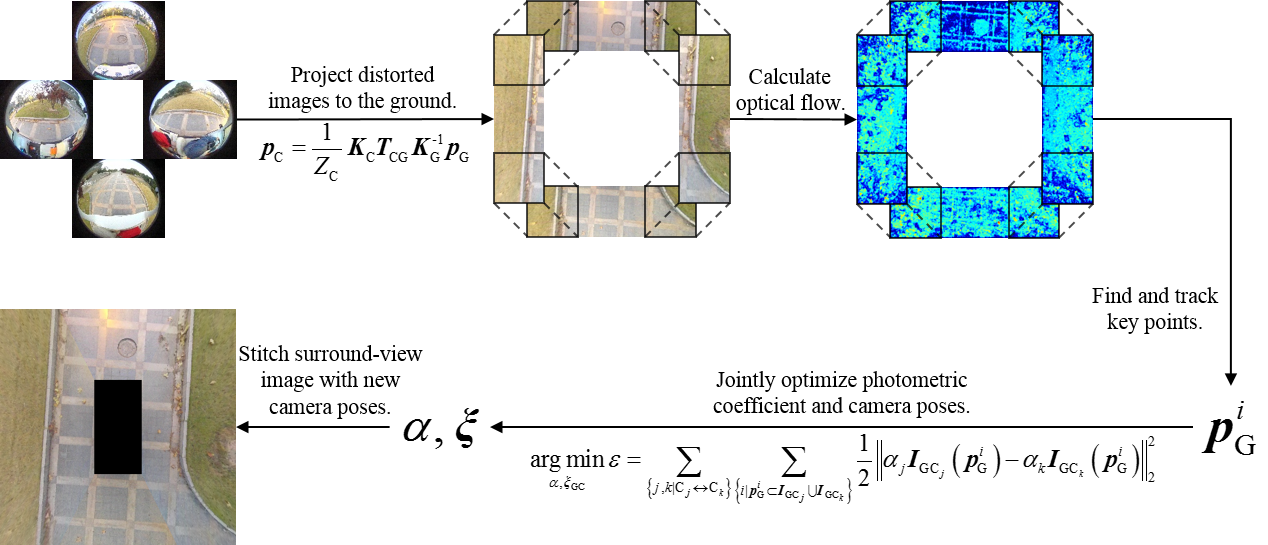
Flow chart of online compensation. Online compensation is to solve the problem of camera pose drifting when the vehicle is moving. The algorithm will update the camera poses in real time by minimizing the photometric error between ground projections from adjacent cameras. For each camera, an overall photometric coefficients are also added into the energy function to soften the boundary between adjacent views. The following video is the result of our algorithm.
Binocular Stereo Matching
Directed by Prof. Jianwei Lu, Tongji University • Sep, 2016 — Jul, 2018
- Researched on binocular stereo matching algorithm based on deep learning.
- Proposed a new convolutional neural network architecture MC-DCNN for stereo matching.
- Introduced dilated convolution and multi-scale feature fusion into the network architecture.
- Proposed a new method for disparity map refinement.
- Paper "MC-DCNN: Dilated Convolutional Neural Network for Computing Stereo Matching Cost" published in ICONIP 2017
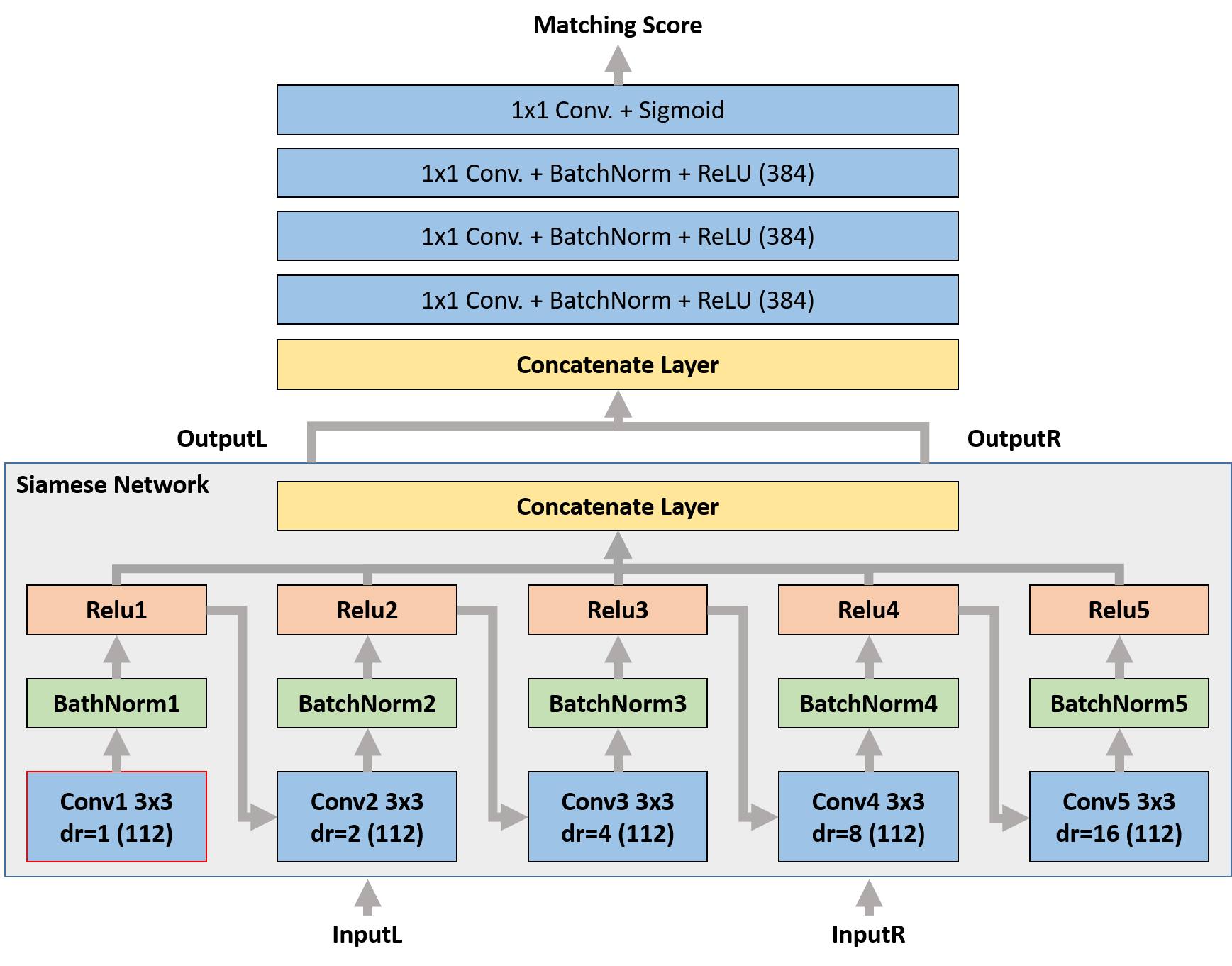
Architecture of MC-DCNN.
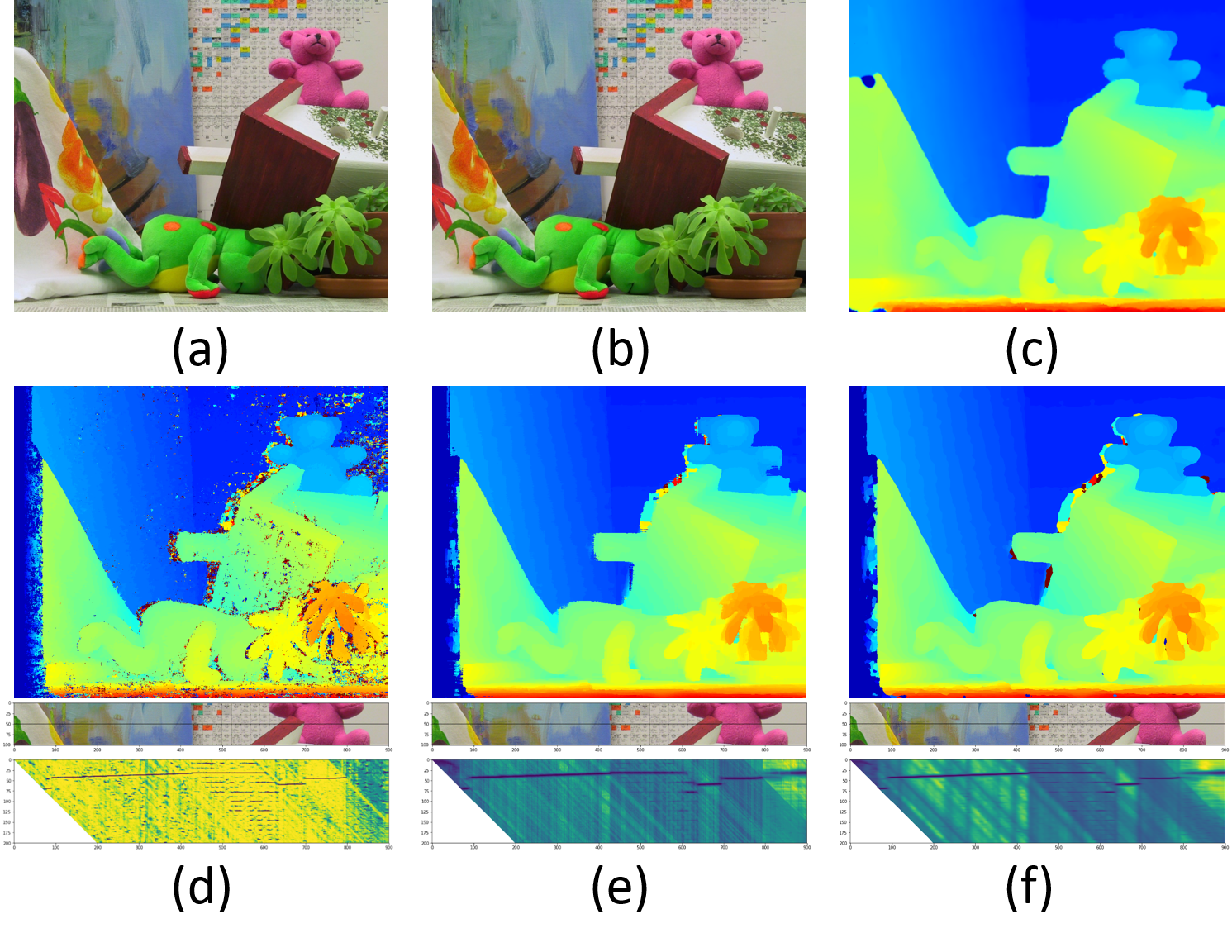
(a) and (b) are the left and right image captured by stereo camera. (c) is the final result of our algorithm. (d)~(f) are disparity maps in different phase of our algorithm, while the lower of them are matching cost in different disparity of a row of pixel. (d) WTA (e) CBCA (f) SGM
Pulmonary Nodule Classification
Directed by Prof. Jianwei Lu • Sep, 2017 — Oct,2018
- Researched on classifying the malignancy of the pulmonary nodules based on deep learning.
- Proposed a 3D spatial pyramid dilated convolution network to classify pulmonary nodules’ malignancy.
- Introduced 3D dilated convolution into the network to learn the detailed characteristic information of the pulmonary nodules and concatenated multiple features extracted by different dilated convolutions with different receptive fields.
- Paper "3D Spatial Pyramid Dilated Network for Pulmonary Nodule Classification" published in Symmetry 2018
Projects and Competitions
Autonomous Mobile Robot
Head of the Development Group & Primary Developer • Sep, 2015 — Jul, 2016
- Researched on autonomous mobile robot driven by 2D SLAM and navigation.
- Responsible for hardware and software deployment and algorithm development for mobile robot with 2D lidar sensor and RGB-D sensor.
- Established a mobile robot capable of mapping, localization and self-navigation
- Applied ROS (robot operating system) to the mobile robot and deployed Gmapping, AMCL (Adaptive Monte Carlo Localization) and a navigation module in ROS to drive the robot.
- Developed a visual SLAM program based on RGB-D data.
“Eat Just” Health Project
Primary Developer • May, 2016 — Oct, 2016
- Researched on detection and classification of dishes in images.
- Responsible for collecting and labeling dish images and developing algorithm for dish detection.
- Established a labeled image database of more than 2000 kinds of Chinese dishes and
- Developed a method for dish detection based on faster-RCNN.
- A patent of this project is announced in 2018.
HASCO Intelligent Car Challenge 2016
Primary Developer • Jul, 2016 — Aug, 2016
- A competition on autonomous mobile cars with single camera.
- Responsible for image processing, including recognition of traffic signs and lines.
- Implemented camera distortion correction and image binaryzation algorithm.
- Developed a traffic line and sign detection algorithm.
- Developed a traffic sign classification algorithm based on decision tree.
Recognition
Huate Scholarship (Top 5%)
Tongji University • 2017
Awarded Huate Scholarship for outstanding performance during the postgraduate stage.
Techical Strength
Programming languages
Matlab, Python, C/C++
Packages & Tools
OpenCV, Caffe, TensorFlow, ROS
Social Links
- Github: https://github.com/johnsmith2012
- Website: https://johnsmith2012.github.io/resume/